作者:Steve Leibson, 赛灵思战略营销与业务规划总监
在Kickstarter网上出现了一个新型、独特的项目,叫作Phenox,它是一个智能四旋翼微型无人机,可按照语音命令、声音、手势飞行。自主微型无人机足够小、重量轻,可在人手上起飞降落。由Xilinx Zynq SoC提供的Phenox板载智能系统可使得无人机自主飞行和悬停。使用两个板载摄像机、各种传感器、惯性测量单元(IMU )和麦克风可设置Phenox监控环境,并进行相应的回应。就象在Kickstarter上的说明那样—— “您只需打电话,或举起手,就能够操作Phenox。”
以下Phenox项目在Kickstarter上的视频:
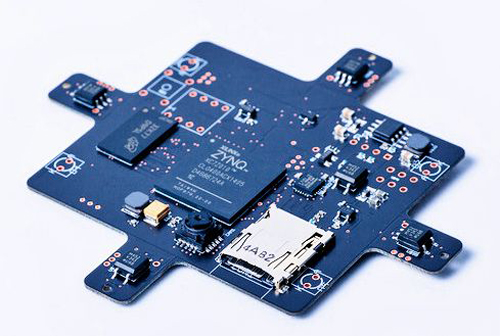
以下为控制板图片,它包括Zynq SoC、256M DDR3 SDRAM、SD卡插槽、下向摄像头、IMU和功率器件。
该项目筹资活动仅仅三天,要求赞助的资金已达到筹资项目所需资金的四倍以上,距项目正式启动还有27天。
原文链接:
http://forums.xilinx.com/t5/Xcell-Daily-Blog/Zynq-based-Phenox-Quadcopte...
© Copyright 2014 Xilinx Inc.
如需转载,请注明出处

本视频基于Xilinx公司的Artix-7FPGA器件以及各种丰富的入门和进阶外设,提供了一些典型的工程实例,帮助读者从FPGA基础知识、逻辑设计概念

本课程为“从零开始大战FPGA”系列课程的基础篇。课程通俗易懂、逻辑性强、示例丰富,课程中尤其强调在设计过程中对“时序”和“逻辑”的把控,以及硬件描述语言与硬件电路相对应的“

课程中首先会给大家讲解在企业中一般数字电路从算法到流片这整个过程中会涉及到哪些流程,都分别使用什么工具,以及其中每个流程都分别做了
@2003-2020 中国电子顶级开发网





