作者:Steve Leibson, 赛灵思战略营销与业务规划总监
不到一个月之前,发表在《Xilinx午后加油站》的一篇博文探讨了EVT宣布的新 Razercam 智能工业相机。(请参阅“基于Zynq系列RazerCam是新的智能工业机器视觉摄像头,支持三种不同传感器的选择。”)博文探讨了,Linux操作系统运行在RazerCam综合赛灵思Zynq 系列的SOC(片上系统)上时,提到了使用C或C + +局部处理算法的Zynq系列 SOC程序集成ARM Cortex-A9 MPCore相机的两个处理器的能力。EVT刚刚推出的EyeVision3.0软件的修订版,集成了来自硅谷软件的图形化FPGA编程软件,使用了Zynq系列SOC的片上可编程逻辑,因而可以大大加快图像处理的速度。

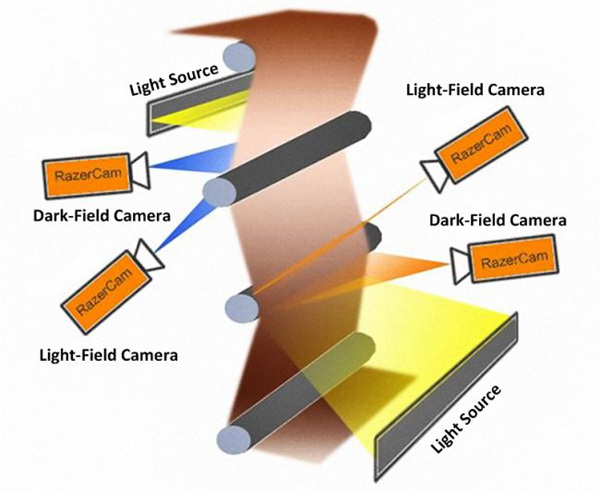
这个额外的图像处理速度,对于执行高速的模式识别算法和复杂的表面检查是非常有用的。EVT宣布的其中一个RazerCam应用是轧钢检测。在这个应用程序的一个版本中,两对EVT 的RazerCam都配有高速(10000fps)线扫描传感器。一对Razercam检测高速滚动的钢带一边,一对检测另一边。
对于每一对摄像头,其中一个在进行光场(入射光)检测的时候,另一个进行暗场检测,为了使反射光的大部分没有影响摄像镜头,可以通过阴影和倾斜角度来控制光强。光场照明对刮痕和凹痕缺陷比较容易识别,它们在光场背景中显示为暗区。而淡且杂散的光进入暗场摄像镜头时,表面的不规则,诸如划痕、擦伤、碰伤和浮雕等,在深色背景下显示为亮区。
因此,光场照明摄像头需要和暗场照明摄像头不同的图像处理算法。因为这个相机检测的钢带高速滚动,所以行扫描局部处理是实现实时图像处理最经济的方式。下面是对钢材安装检测的简单示意图:
原文链接:
http://forums.xilinx.com/t5/Xcell-Daily-Blog/Catch-me-if-you-can-says-th...
© Copyright 2014 Xilinx Inc
如需转载,请注明出处








