作者:国家仪器学术营销总监 Dave Wilson
在美国,抽血师每年大约要抽血14亿次。这是使用的最为广泛的医学临床手段。随着一代人的变老,每年的抽血检查次数也会更多。一次性的准确度依赖于患者的生理机能和医生的经验。人类的准确度估计大约在50%左右。这并不高,特别如果你是一个很难找到静脉的人。
VenousPro的原型设计提出了三个主要挑战:
• 首先,设备需要是安全的,这意味着可重复性和确定性的执行
• 其次,设备需要高便携性,以便在临床环境下大范围使用。
• 最后,系统需要通过FDA严格的评估
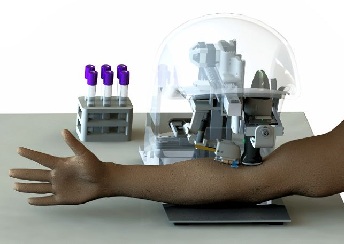
首套原型编程使用MathWorks的MATLAB完成。随着VenousPro设计更加复杂和工程团队的扩增,VascuLogic意识到他们需要一个更集成的开发平台。公司提出申请并且收到了国家仪器(NI)的医用设备创新基金,同时还同意定制NI硬件,LabVIEW和NI培训和认证项目。VascuLogic使用国家仪器的CompactRIO 可重配置的监控系统来控制机器人,建造了第二代VenousPro原型。
两个增强灵敏度的近红外GigE vision的摄像头和一个超声波探针为CompactRIO控制器提供了影像信息。一块 Xilinx Spartan-6 FPGA实现了图像流水线。图像处理流水线使用了NI视觉开发模块的先进的算法,图像中提取的3D位置和速度信息以每秒20帧与CompactRIO运动控制模块通信。CompactRIO系统指挥机器针的机械手。
VenousPro设备的核心含有NI CompactRIO-9025实时控制器的5个I/O模块,其中4个 NI 9514 C系列带有编码反馈模块的伺服驱动接口指挥4自由度的微型机器手,1个NI 9401 C系列数字I/O模块提供了双向通信的8个通道。
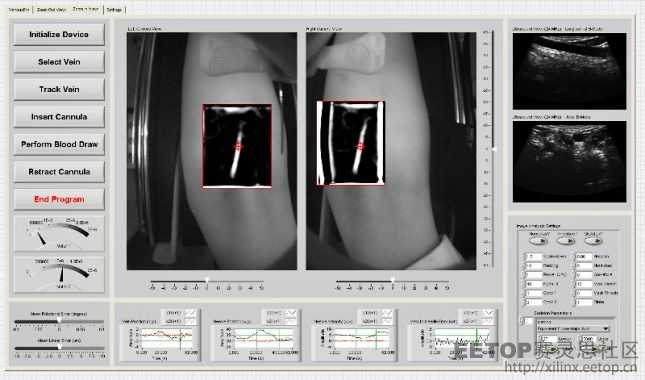
公司将MATLAB代码转换成LabVIEW可视化设计并开发了直观的用户界面。VenousPro设备运用了NI
LabVIEW的机器人模块里的的运动学、PID和路线规划VI,例如用针尖的3D笛卡尔坐标关联
机器人臂的关节角。它还使用了LabVIEW控制设计和仿真模块,根据当前卡尔曼滤波后的速度分布,来预测未来的位置。通过使用LabVIEW
Multicore Analysis和Sparse MatrixToolkit,加速大型矩阵的复杂的数学运算。
原本第二个原型的开发计划有3个月的开发周期,但只花了3周因为LabVIEW环境的灵活性和模块化设计。因此,VascuLogic超前完成了人前、体外、概念证明的测试。
迄今,VascuLogic已经证明在多个体外研究下超过98%的一次性准确率。公司打算升级到新的多核CompactRIO硬件,将用户界面引入 NI触摸板,取消PC主机。在NI平台上开发,VascuLogic能够提前五个月以低于预算$50,000的价格交付设备,以供临床测试。
注意:VascuLogic的Alvin Chen和Max Balter将这个项目提交给2014 NI工程影响力奖评选。它在机器控制组中获胜。它还获得了NI社区选择奖和NI的人道主义奖。
原文链接:
http://forums.xilinx.com/t5/Xcell-Daily-Blog/Vision-guided-robotic-phleb...

本视频基于Xilinx公司的Artix-7FPGA器件以及各种丰富的入门和进阶外设,提供了一些典型的工程实例,帮助读者从FPGA基础知识、逻辑设计概念

本课程为“从零开始大战FPGA”系列课程的基础篇。课程通俗易懂、逻辑性强、示例丰富,课程中尤其强调在设计过程中对“时序”和“逻辑”的把控,以及硬件描述语言与硬件电路相对应的“

课程中首先会给大家讲解在企业中一般数字电路从算法到流片这整个过程中会涉及到哪些流程,都分别使用什么工具,以及其中每个流程都分别做了
@2003-2020 中国电子顶级开发网





