作者:Steve Leibson, 赛灵思战略营销与业务规划总监
虽然不像是在公园里散步或者外出兜兜风那样轻松简单,但是现在搭建一部自动驾驶的汽车已经不再是件难事了,来自KAIST(韩国高等科学技术学院)
的工程专业的学生仅仅花费了两年时间就开发出了他们的第一部自动驾驶汽车——EureCar(听起来像Eureka—动漫人物)。EureCar使用了一
个高精度了定位系统,七个激光扫描仪和四部摄像机,当它在预先设计好的路线上行驶过程中这些设备能够帮助它避开障碍物,遵守交通法规!这很重要。
EureCar
Turbo,这是第二部工程车,基于一部浅黄色的现代Veloster车型,仅仅花费了六个月的时间就完成了开发工作,而且只需要两个月的时间就可以为这
部车开发出一套全新的软件系统。

EureCar和EureCar
Turbo的控制系统是基于美国国家仪器公司(NI)的CompactRIO-9024实时控制器和CompactRIO-9114八个接口的可配置扩展
板(包含了赛灵思Virtex-5
FPGA芯片)。这个设计同样也使用了几个美国国家仪器公司(NI)的CompactRIO模块,插入到带有八个接口的扩展底板上,用于与汽车的传感器和
执行器之间的通信,传感器和执行器系统包含了激光雷达装置,摄像机设备,GPS单元和一个惯性导航封装包。这个复杂的闭环控制系统采用模糊控制算法和
PID控制算法实现,并且是通过美国国家仪器公司(NI)的LabVIEW软件和软件内置的LabVIEW FPGA
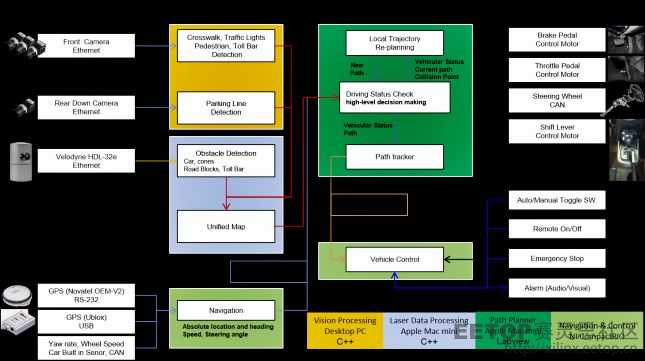
模块完成算法的程序设计。下面是这个控制系统的模块框图:
下面这段视频展示的是今年年初,这部无人驾驶的EureCar Turbo汽车在KAIST校园内行驶的情况 :
我们可以注意到在这部视频的结尾一个行人想要与这部车开个玩笑。起初这部车尝试避开这个行人,但是当这个行人故意纠缠不让路时,这部车主动停止了行 驶以防发生交通事故。这个视频会让你相信Asimov虚构的机器人三定律(1.机器人不能危害人, 或任人受伤而袖手旁观。 2.除非违背第一定律,机器人必须服从人的命令。3.除非违背第一及第二定律,机器人必须保护自己。)。
注:在德克萨斯州奥斯汀最近举办的NI Week大会期间,在NI 工程影响力颁奖晚会上这个由学生完成的工程是三个被突出表彰的工程之一。
原文链接:
http://forums.xilinx.com/t5/Xcell-Daily-Blog/Now-even-students-can-build...

本视频基于Xilinx公司的Artix-7FPGA器件以及各种丰富的入门和进阶外设,提供了一些典型的工程实例,帮助读者从FPGA基础知识、逻辑设计概念

本课程为“从零开始大战FPGA”系列课程的基础篇。课程通俗易懂、逻辑性强、示例丰富,课程中尤其强调在设计过程中对“时序”和“逻辑”的把控,以及硬件描述语言与硬件电路相对应的“

课程中首先会给大家讲解在企业中一般数字电路从算法到流片这整个过程中会涉及到哪些流程,都分别使用什么工具,以及其中每个流程都分别做了
@2003-2020 中国电子顶级开发网





