作者:Steve Leibson, 赛灵思战略营销与业务规划总监
依靠NI myRIO控制的4块鳍,敏捷的水下机器人Sepios能够向6个方向移动
这个方案将向您演示一个采用NI MyRIO控制的4鳍水下机器人方案,这个由学生制造的Sepios水下机器人依靠4块波动鳍作为其唯一的动力来源,可提供6个方向轴的自由度:
• 上下
• 左右
• 前后
• 翻滚
• 颠簸
• 偏航
仿生机器人模拟乌贼,展现它一侧的长鳍,产生推力促使波状运动。这种水下推动的特殊形式使得乌贼可以快速转换方向,产生侧向推力,从而在不发出预警的情况下偷袭猎物。这里有一段视频,两个不同的乌贼展示的运动激发了这个项目:
瑞士联邦理工学院-苏黎士的一支学生设计团队决定将乌贼这种独特的推动机制应用于水下机器人。他们还决定通过增加两块(一共四块鳍)使得乌贼更棒。这四块鳍每块单独由9个伺服电机控制,制造波动。
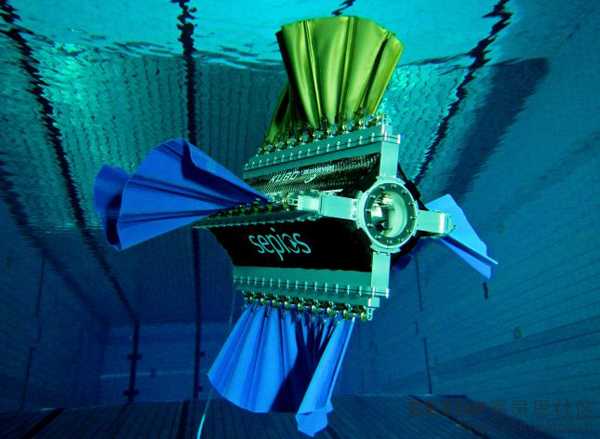
每个鳍的9个独立伺服电机通过锥形齿轮来驱动一束射线。每束射线绕着鳍的前后轴移动270度。每块鳍都有独立的伺服电机控制器,伺服控制器轮流由美国国家仪器(NI)的 myRIO数据采集和控制系统操作,该系统是基于赛灵思 Zynq SoC,专门为学生设计项目而设计。
Sepios水下机器人还包含一个摄影机,一个IMU(惯性测量单元)用于测量加速度和陀螺仪的力,一个激光器用于碰撞检测,一个湿度传感器检测内部泄漏,和一个水下深度传感器。NI的myRIO控制器搜集并使用来自这些传感器的所有信息,用于导航,通过有线以太网链路与水下手持3D空间鼠标控制器通信。来自鼠标控制器的命令和传感器信息帮助myRIO控制器决定如何操作这四块鳍。
结果就出现了机动性很强的机器人,与螺旋桨驱动的船只相比产生很小的航迹。推进系统好像是虚构的履带驱动的,推动着Red October潜艇。这艘潜艇在1984年Tom Clancy的小说“The Hunt for Red October”和后来的电影中提到。
第一款Sepios原型是由Lego NXT砖块驱动的单鳍船。硬件很快搭建完成但是团队花费一周多时间用C语言编写简单的正弦波运动。团队中的一员建议尝试使用NI的LabVIEW图形化系统设计环境。花了半天时间,机器人就能够执行团队设计的任何功能。硬件设计计划立刻就从计划好的树莓派系统转变为NI myRIO,团队也获得了NI的赞助。
当硬件整理好后,其他一切都完好工作。也许需要几年才能实现的深度控制器在LabVIEW下工作。使用LabVIEW节省了大量的时间,使得学生团队可以集中精力在其他重要方面,比如控制分配和用户界面。
最后,这是一段Sepios在海里畅游的视频:
注意:这个学生项目是最近在德州Austin举行的NI Week期间的NI工程影响力大奖晚会上三个杰出项目的其中之一。它是2014 NI国际学生设计展览会的学生项目奖的获奖作品。
原文链接:
http://forums.xilinx.com/t5/Xcell-Daily-Blog/Nimble-underwater-Sepios-ro...

本视频基于Xilinx公司的Artix-7FPGA器件以及各种丰富的入门和进阶外设,提供了一些典型的工程实例,帮助读者从FPGA基础知识、逻辑设计概念

本课程为“从零开始大战FPGA”系列课程的基础篇。课程通俗易懂、逻辑性强、示例丰富,课程中尤其强调在设计过程中对“时序”和“逻辑”的把控,以及硬件描述语言与硬件电路相对应的“

课程中首先会给大家讲解在企业中一般数字电路从算法到流片这整个过程中会涉及到哪些流程,都分别使用什么工具,以及其中每个流程都分别做了
@2003-2020 中国电子顶级开发网





