制造领域为许多人提供了喜闻乐见的业余爱好,也激励着年轻人从事科学、技术、工程和数学方向的职业。这个领域的许多项目都使用嵌入式处理器(通常如
Arduino 或 Raspberry PI 系列),以提供系统所需的智能化。
Arduino 和 Raspberry PI 这两大系列嵌入式处理器均得到开发环境的支持,为其提供多种软件库、模块和实例。这些软件库、模块和实例可帮助开发人员迅速方便地接口到各类型外设,如摄像头、加速计和电机等。正是这种易用性让这些处理器在制造领域倍受青睐。
直到最近制造商都把 All Programmable SoC 排除在制造领域之外,认为它适用于更专业的工程师。但随着
ZynqBerry、Pynq 和 Snickerdoodle 等基于 Zynq® 的开发板的推出以及基于软件的开发方法的问世,这种情况已经发生根本性变化。
这些开发板配有赛灵思 All Programmable Zynq®-7000 SoC 系列器件。这些器件将双核 ARM® Cortex™-A9 处理器与 All Programmable Artix®-7 FPGA 系列的可编程逻辑完美结合在一起。这可加快可编程逻辑架构内的功能,从而显著提升系统性能。但是传统的开发工作将可编程逻辑的设计与软件开发工作分割开来,可编程逻辑设计的实现需要专门的开发经验。现在已不存在这种情况。
当这些开发板与能在纯软件中开发应用的最新开发环境相结合,它们对制造业就变得极为有用。尤其是因为使用这些开发环境,用户不必具备FPGA专家级水平就能够开发出可编程逻辑,从而充分发挥了软硬件的优势。
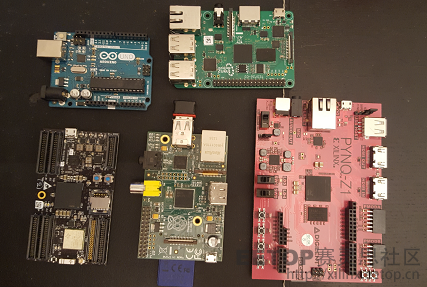
从左到右制造商开发板分别是 Arduino、ZynqBerry、Pynq、Raspberry 和 Snickerdoodle。
有两种开发环境可用于为这些 Zynq 开发板创建应用。第一种是基于 Eclipse 的 SDSoC™ 开发环境。这种环境能够使用 C 或 C++ 开发应用并无缝地将运行在
ARM Cortex-A9 处理器上的功能移到可编程逻辑中加速。SDSoC 环境使用高层次综合(HLS)将选定的 C 语言功能移到可编程逻辑中。在 HLS 完成连接后,就使用框架将
HLS 模块与软件应用集成。现在除了可编程逻辑中的功能加速带来的性能提升,该流程还对用户透明。功能在处理器和可编程逻辑间切换极为简便并可在 SDSoC 内通过使用项目简介进行控制。
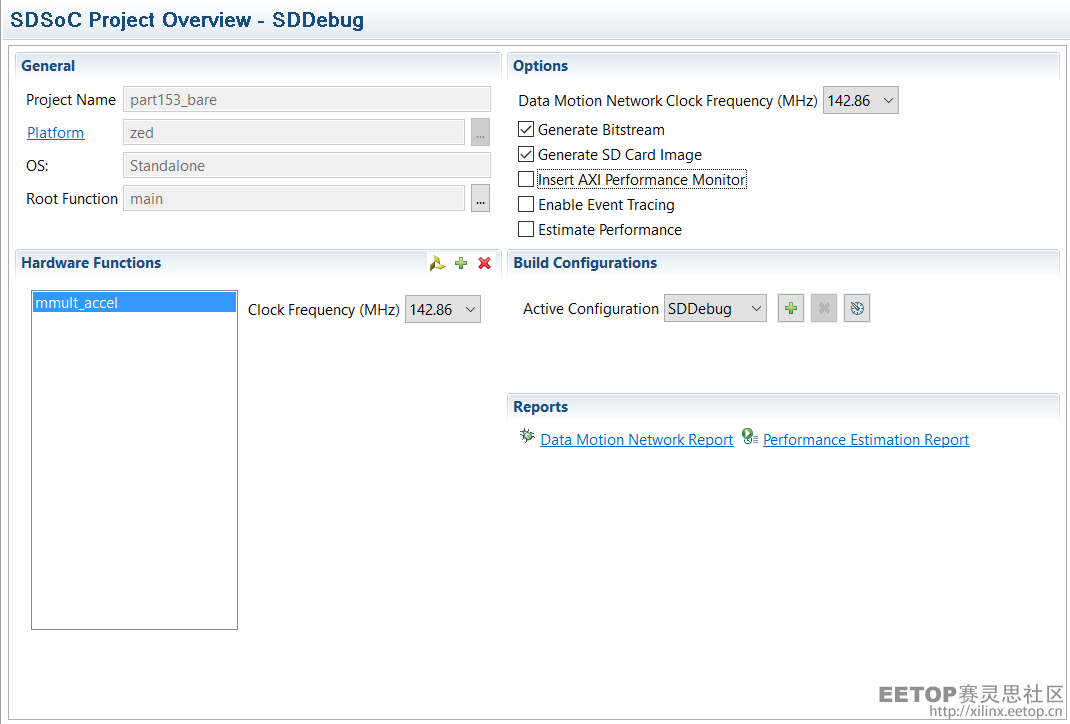
SDSoC 项目简介
SDSoC 支持制造业常用的 Linux 操作系统,同时也支持实时操作系统(FreeRTOS)和裸机。
第二种方法由 Pynq 提供,这种方法提供基于 Python 和 Juypter 笔记本的开发框架。二者都在运行于处理器上的
Linux 发行版上执行,同时可编程逻辑有一个已定义的叠层,用于为 Pynq 上的外设提供连接。在用于支持外设和硬件叠层的 Linux 发行版内有一个已定义的
Pynq 包,该包可让我们使用 Python 直接接口外设。
因为 Pynq 提供两个 PMOD 接口,该软件包能为 ADC、DAC 等各种 PMOD 提供重大支持,简化与
Python 应用的集成。
在 Pynq 内,用许多叠层中的一个来加载可编程逻辑以实现硬件加速。除提供的基本叠层外,还存在多个开源叠层。
用户可通过借助 Web 浏览器连接到 Juypter 笔记本服务器为 Pynq 编程。连接到该笔记本电脑后,他们就能开发自己的
Python 应用并为其建立文档,以便在 Pynq 上运行。
这种使用 Python 并运用 Python 直接接口 PMOD 的能力提供了一种极为强大的开发平台。
两种开发方法都提供使用 OpenCV 等开源嵌入式视觉框架来执行嵌入式视觉应用的能力。在 Linux 发行版支持 USB
视频类或特定摄像头(例如 ZynqBerry 支持的 Raspberry PI 摄像头)时,这些应用能够使用网络摄像头。
OpenCV 方便开发人员使用 C/C++ 或者 Python 开发,运用这一框架他们能够便捷地实现复杂图像处理算法,发挥
Zynq 可编程逻辑的加速功能,显著提升性能。
这些应用借助这一框架能处理图像,检测对象或面部等。
在需要实现简单的对象检测算法时,它们能在基于 Zynq 的平台上运行 Linux、Python 和 OpenCV。下面我们了解如何使用
OpenCV 和网络摄像头实现简单的对象跟踪系统。他们要实现的算法是:
1. 从网络摄像头捕获第一帧。第一帧用作基准背景帧。他们将检测从第一帧的场景中发生的任何变化。
2. 将色域从
RGB 转换为灰度。这是一种常见的图像分割技术,能用于创建二值图像。图像分割涉及数种将图像划分为多个片段(常称为超像素)的方法。通过分割,更易于分析各片段的内容。在他们的应用中,他们使用阈值化来从前景中分割出背景。这样可以生成二值图像。
3. 对图像进行高斯模糊。许多用于检测对象或边缘的图像处理应用的性能受抓取的帧内存在的噪声的不利影响。在进一步处理前将图像模糊化可降低帧内的噪声。这一方法常用于图像处理,尤其是边缘检测算法(例如高斯边缘检测算法的拉普拉斯算子)。这一运算的结果即为用于检测变化的基准图像。
4. 再次重复步骤1-3,从网络摄像头中捕获另一图像,从彩色域转换到灰度并在图像上执行高斯模糊。
5. 计算基准帧和最近采集的图像间的绝对差。
6. 对绝对差进行取阈,以创建二值图像。
7. 开展形态学操作,扩大图像以放大任何差异。
8. 找出二值图像中剩余的等值线并忽略面积过小的任何等值线。
9. 在每个被检测出的等值线周围画一个方框,通过
HDMI 输出显示原始采集的图像。
开发人员能直接在 ZynqBerry 上或是在 Juypter 笔记本内的 Pynq 上运行结果 python 代码。他们看到的图像如下图所示,该图识别出了与基准图像的差异并用方框高亮显示出这些差异。

图像跟踪应用的结果。
这个实例体现了开发人员运用熟悉的开源框架,借助 Zynq 平台执行他们的嵌入式视觉应用所带来的强大功能和简便性。
本文呈现的开发环境展现了开发人员发挥多个Zynq开发板的功能的简便性。这些开发环境让用户开发出既能在处理器内的处理内核上执行,又能使用可编程逻辑加速的设计。

本视频基于Xilinx公司的Artix-7FPGA器件以及各种丰富的入门和进阶外设,提供了一些典型的工程实例,帮助读者从FPGA基础知识、逻辑设计概念

本课程为“从零开始大战FPGA”系列课程的基础篇。课程通俗易懂、逻辑性强、示例丰富,课程中尤其强调在设计过程中对“时序”和“逻辑”的把控,以及硬件描述语言与硬件电路相对应的“

课程中首先会给大家讲解在企业中一般数字电路从算法到流片这整个过程中会涉及到哪些流程,都分别使用什么工具,以及其中每个流程都分别做了
@2003-2020 中国电子顶级开发网





