1 引言
科学级CCD相机(Scientific grade CCD camera)是一种具有低噪声、高灵敏度、大动态范围和高量子效率等优良性能的CCD相机,用于对微光信号检测和微光成像。它在射线数字成像检测、生物医学工程、水下摄影、武器装备、天文观测、空间对地观测等多种技术领域得到了广泛应用。
科学级CCD相机一般由高速CCD 感光芯片、视频信号处理器、时序控制器、时序发生器、时序驱动器、外部光学成像系统等部分组成,其中时序发生器性能的优劣直接决定了相机的品质参数。该科学级CCD相机采用DALSA公司的IL-E2 型TDI-CCD作为
2 TDI-CCD的工作原理及驱动分析
2.1 TDI-CCD工作原理简介
TDI(time delay and integration)是一种能够增加线扫描传感器灵敏度的扫描技术。TDI-CCD是具有一种面阵结构、线阵输出的新型CCD,较普通的线阵CCD而言,它具有多重级数延时积分的功能。从其结构来看,多个线阵平行排列,像元在线阵方向和级数方向呈矩形排列,像元分布示意图如图1所示。
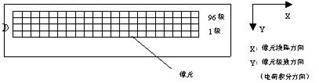
图1 TDI-CCD像元分布示意图
图1中,TDI-CCD的电荷累积方向是沿Y向进行的,其推扫级数自下而上为第1级至第96级。在成像过程中,随着相机(或景物)的运动,TDI-CCD从第96级至第1级依次感光,电荷从第96级至第1级逐级累积。最终,经过多重延时积分积累起来的电荷包(成像数据信息)转移到CCD水平读出寄存器上,并从第1级经
2.2 关于DALSA IL-E2型TDI-CCD 图像传感器
CCD 图像传感器是科学级CCD相机的关键组成部件, 其性能的优劣直接影响着相机的功能和使用效果。该科学级CCD 相机选用了加拿大DALSA 公司生产的IL-E2型TDI-CCD 图像传感器,该TDI-CCD的像素结构 2048×96 。像元尺寸为13μm( H) ×13μm( V )、最高数据输出频率为20MHz 、动态范围为1600:1 、单向、单端输出、级数可选、具有蓝光响应增强功能的TDI-CCD。IL-E2型TDI-CCD可以分为3个功能区,即光敏元探测区、电荷传输区、检测输出区。
2.3 IL-E2型TDI-CCD驱动时序分析
TDI-CCD的驱动时序控制比普通线阵CCD的驱动时序控制要复杂的多, IL-E2型TDI-CCD的时序控制包括各种直流电平控制和各种时钟脉冲序列控制。对于前者,主要包括供电电压VDD、输出栅电压VEST、溢出栅电压VOV、衬底电压VBB和级数控制偏置电压等;对于后者,主要包括行转移时钟脉冲TCK,像元移位读出时钟脉冲CR1、CR2,输出复位时钟脉冲RST,TDI方向移位寄存器驱动时钟脉冲CI1~CI4,级数控制时钟脉冲CSS6、CSS12、CSS24、CSS48。TDI-CCD工作时,在行转移时钟脉冲TCK为高电平期间,像元感光产生的信号电荷在TDI方向移位寄存器驱动时钟脉冲CI1、CI2、CI3、CI4的共同作用下,沿着TDI(TDI级数由TDI级数控制脉冲选为6、12、24、48、96中的一种)方向积累并转移到输出移位寄存器中;当TCK为低电平时,TDI-CCD在像元移位读出时钟脉冲CR1、CR2的作用下,输出复位时钟脉冲RST每来一个有效电平高电平时,TDI-CCD的输出信号OS端输出一个信号,直到信号输出完为止。之后TCK由低电平变为高电平,CI1、CI2、CI3、CI4也相应的变为有效电平,转移上一次转移完后像元感光产生的信号电荷,开始一个新的周期。这些时序控制的详细对应关系如图2所示。
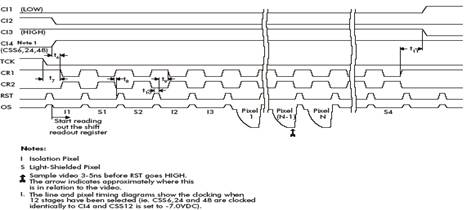
图2 TDI-CCD时序详图
对于此TDI-CCD时序设计与普通线阵CCD时序设计存在以下几个突出特点。(1)在TDI方向存在4相移位寄存器驱动时钟,它们的周期与行周期一致,高电平脉宽t3应大于3μs, CI1的上升沿滞后于TCK的上升沿,CI2的下降沿滞后于TCK的下降沿,CI1、CI2的高电平脉宽至少有1μs的重叠。CI3、CI4在时序关系上分别为CI1、CI2的倒相。(2)此TDI-CCD的工作级数可以通过CSS6、CSS12、CSS24、CSS48四个级数选择信号进行控制,使其工作于96、48、24、12和6级。
3 时序发生器的原理组成和工作过程分析
时序发生器产生TDI-CCD、视频处理器和图像数据输出所需的各种时钟脉冲信号, 时序发生器在CCD成像单元工作中起着时间上同步协调的作用。它由时序控制器给出的指令和参数予以控制。时序控制器控制TDI-CCD工作时的行转移周期, 积分级数,控制指令和参数以串行数据的形式送至时序控制器中,时序发生器根据时序控制器给出的指令和数据产生TDI-CCD和视频处理器所需要的时钟脉冲信号: 行转移时钟脉冲、像元移位读出时钟脉冲、输出复位时钟脉冲、TDI方向移位寄存器驱动时钟脉冲、级数控制时钟脉冲、相关双采样时钟脉冲、A/D
时序发生器的设计:时序发生器生成TDI-CCD、视频处理器和图像数据输出所需要的各种时序。所有时序是由主振脉冲序列通过逐级分频后的脉冲序列进行逻辑和组合运算产生的。它们之间满足严格的相位关系, 这是相机系统协调工作的基础。时序发生器的功能框图如图3所示。相机系统一通电就应保证立即工作在内部默认方式, 这样就能够马上判断系统是否正常。如果外部或内部设置指令无效, 系统也返回默认方式, 这是相机系统可靠性的体现。时序发生器所产生的各种时钟由VHDL 语言完成。
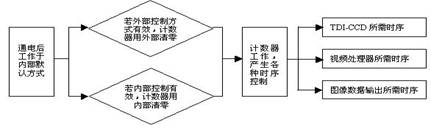
图3 时序发生器功能框图
4 用 FPGA器件实现科学级CCD相机时序发生器
4.1 FPGA技术及FPGA器件
FPGA-现场可编程门阵列技术是二十年前出现,而在近几年快速发展的可编程逻辑器件技术。这种基于EDA技术的芯片正在成为电子系统设计的主流。大规模可编程逻辑器件FPGA是当今应用最广泛的可编程专用集成电路(ASIC)。设计人员利用它可以在办公室或实验室里设计出所需的专用集成电路,从而大大缩短了产品上市时间,降低了开发成本。此外,FPGA还具有静态可重复编程和动态在系统重构的特性,使得硬件的功能可以像软件一样通过编程来修改。因此,FPGA技术的应用前景非常广阔。
XC2VP20-FF1152 是Xilinx 公司推出的Virtex-II Pro 系列的FPGA,它内部有丰富的资源[5],包括8 个数字时钟管理器(DCM),290Kbits 的分布RAM,88×16kByte 的Block RAM,88 个18×18 的专用乘法器(Dedicated Multipliers)单元,2 个
4.2 基于FPGA的科学级CCD相机时序发生器的设计与仿真
IL-E2型TDI-CCD的像元数有每行512,1024和2048三种,本文以2048像元数为例设计时序电路。2048为有效像元数,由于每行有5个隔离像元,4个暗参考像元,故设计中要保证最少使每行输出2057个像元,也就是使每个行周期内最少有2057个CR1、CR2、RST驱动脉冲。每行除了2057个像元驱动脉冲以外,其余为空驱动脉冲。空驱动脉冲数越多,行周期时间越长,CCD曝光积分时间越长,灵敏度相应提高,但过长的曝光积分时间会使CCD输出饱和失真,故空驱动脉冲数目不易过多。积分时间和像元移位读出时钟频率是CCD时序电路的设计依据。在工程应用中,我们根据技术指标要求,算出行积分时间即行周期(T)为0.365ms,以此确定合适的系统主时钟。驱动时序用超高速集成电路硬件描述语言(VHDL)编写,程序主要包括:(1)调用所需的库函数和程序包;(2)定义输入和输出端口;(3)用计数器对输入的系统主时钟进行分频。(4)驱动时序信号的产生和输出。由XILINX公司的设计软件ISE6.2对XC2VP20-FF1152器件进行时序设计,通过时序仿真与工程应用验证了能完成上述所有功能。系统逻辑功能时序仿真波形如图4所示。

图4时序发生器时序仿真图
5 结束语
本文的创新是采用FPGA 器件设计科学级CCD相机时序发生器, 使得电路由原来复杂的设计变成主要只用一片XILINX公司的可编程器件XC2VP20-FF1152来实现。独立的单元测试与系统联调结果均表明: 采用现场可编程门阵列(FPGA) 技术实现CCD相机时序发生器, 可使电路成倍简化,提高了系统的集成度,时序发生器抗干扰能力也增强了,其功耗也成倍降低,从而实现了科学级CCD 相机工作时的高可靠性、稳定性,同时还使设计与调试周期成倍缩短。该设计方案为TDI-CCD在科学级CCD相机中的应用开拓了更加广阔的前景。

本视频基于Xilinx公司的Artix-7FPGA器件以及各种丰富的入门和进阶外设,提供了一些典型的工程实例,帮助读者从FPGA基础知识、逻辑设计概念

本课程为“从零开始大战FPGA”系列课程的基础篇。课程通俗易懂、逻辑性强、示例丰富,课程中尤其强调在设计过程中对“时序”和“逻辑”的把控,以及硬件描述语言与硬件电路相对应的“

课程中首先会给大家讲解在企业中一般数字电路从算法到流片这整个过程中会涉及到哪些流程,都分别使用什么工具,以及其中每个流程都分别做了
@2003-2020 中国电子顶级开发网





